トビ(Japanese Black Kite)のオペラント条件づけ
環境に優しい発電として風力発電が知られていますが、天然記念物のオオワシやオジロワシが風車に衝突して死亡する事故が生じていて、何らかの対策は求められています。対策を講ずるためには、なぜ風車に衝突するのかという原因の究明が必要です。これまで提示されている仮説の中で有力な説に、モーションスメアー仮説があります。風車は遠くから見るとゆっくり回転しているように見えますが、風車の先端は新幹線並みの300Km程度の速さで回転している場合があります。物体が高速で移動すると、透けて見えるモーションスメアーという現象が生じます。透けて見えるので、飛翔中気づかずに風車の先端に衝突してしまうという仮説です。動物によって、透明化が生じるスピードが異なりますので、猛禽類の閾値を測定する実験を行いました。この説明については、下記の(動画)「風力発電と野生生物」で詳しく説明していますので、関心のある方はご覧ください。この実験では。トビで行っています。下記は、その実験経過報告です。
トビの飼育室と体重計など
トビ(Black-eared Kite: Milvus lineatus)のスキナーボックスによるオペラント条件づけを用いた視覚実験を始めます。トビのスキナーボックスによるこの種の実験は初めての試みと思われます。


大型犬用のケージを流用することにしました。今後は、人工芝を貼った止まり木を入れ、ケージの内側に羽が痛まないようにするための段ボールあるいはビニールを、正面を除いた側面に貼る予定です。照明は、自動的にOn-Offされるようになっています。



ドイツ製の調理用デジタル量りの天板に人工芝を貼り、木製の台に乗せるように改良したもののようです。猛禽類の飼育や道具などについてアドバイスをいただいている杉崎さんに教えていただき、アメリカから直接購入しました。購入金額は、$229.95+$21.95(送料)で、合計$251.90でした。杉崎さんは、行動分析学を取り入れた動物(猛禽類等)の調教と、猛禽類の頭にかぶせる頭巾(Hood)の制作をされている方です。
動物実験では、訓練を始める前に体重をある程度細かに統制する必要があるので、この様な体重計が必要になります。杉崎さんによると、安定体重の75-80%が訓練に適した体重とのことです。これは、デンショバトを使ったオペラント条件づけでよく用いられる体重と同じです。ペンギンの実験のページにも書きましたが、小鳥の場合はこれより高めで、90%ぐらいの基準を用いるか、時間制限で行う場合があります。
装置:トビ用スキナーボックス(ケージ)
実際にトビが搬入されてから、大きさなどを確認後、制作予定です。強化子(餌)提示用のフィーダーは、今まで使われてきたもの(ペンギン実験で用いられたターンテブルを用いたものなど)とはやや異なる仕掛けを考案中です。乞うご期待。
猛禽類の訓練に行動分析学を導入されている杉崎さんによる講習会
猛禽類の扱い方や、訓練の仕方をお聞きするため、杉崎さん宅を訪問させていただきました。杉崎さんは、猛禽の世界的頭巾作家であると同時に、行動分析学に基づいた動物訓練の実践・教育家でもあります。ご自宅には、現在、4羽の猛禽が飼われていました。ハリスホークが2羽、ハヤブサが2羽いました(下の写真をご覧ください)。左から2枚目の写真がハリスホーク。以前はもっと多くの猛禽を飼われていたそうです。





この写真は、1年ほど前、多摩川で訓練を行っている方の鳥を撮影させていただいたものです。なかなかきれいです。南米原産




頭巾にもいろいろなタイプがあるそうです。左端の写真の中央奥の大きな頭巾は、カザフ・フード(イヌワシ用)、その手前は、アングロ・インディアン・フード(ハヤブサやワシ用)

頭巾は、この様に装着します。こうすると、ほとんど動かなくなるそうです。人への馴化訓練(manning)は1ヶ月、慣れない人の場合は1.5か月程かかるそうです。



行動分析学に基づいた訓練の仕方を大変わかりやすく、訪問した5名の学生に教えていただきました。グラブ(伝統的には「餌掛」というそうです)にとまらせるやり方や、適正な体重を見分ける方法などをホワイトボードでわかりやすく丁寧に説明していただきました。餌掛は、正式なものは数万円しますが、溶接用の手袋が代用になるということで、千円強で購入しました。トビ用の頭巾はトビが搬入された後、杉崎さんが作っていただけるとのことで、大変心強く思っています。また、足につける足皮とロープもいただいてきました。


東松山名物の「焼きとり」 レクチャーが終わった後、やきとりやで夕食兼、親睦会を行いました。実は、鳥ではなく東松山名物の「やきとん(豚)」です。なかなか美味しかったです。杉崎さんの邸宅の近くにはもう一つの名物、古墳時代の集合墳墓「吉見百穴」があり、 ヒカリゴケも自生しています。残念ながら、今回は撮影できませんでした。
メリーランド州立大学の視察
現在、猛禽類の視覚に関する実験機器および実験の手順などについての情報を得るため、米国メリーランド州立大学に来ています。メリーランド州立大学には10年ほど前に、ポストドクとして3年半ほど所属していたことがあり、ある程度土地勘がありますので、比較的安心して滞在しています。左下の写真は、心理学科のある建物、右側が最近建設されたバイオサイエンスの建物です。


心理学科と生物学科が同じ建物の中にありますので、動物研究には最適のところです。なお、私が所属していたときは、Zoology-Psychology Buildingでした。現在は、Biology-Psychology Buildingになっています。
心理学科の中には、動物の聴覚および視覚を研究するグループがあって、そこでは、キンカチョウ、セキセイインコ、フクロウ、コウモリ、カマキリ、コオロギ、ゴキブリ、ザリガニ、魚などを研究対象としています。



上の写真は、その実験動物(昆虫)です。メンフクロウを撮影するために部屋の中に入ったところ、2羽のフクロウに襲撃されました。私の頭をかすめるように飛び交って、頭を低くして這々の体で退散せざるを得ませんでした。写真は、ケージの外から金網越しに撮影したものです。



訪問先の教授と食事にでたところ、ちょうどノスリ(Red-Tailed Hawk)がリスを捕まえて食べているところに出くわしました。あわてて、望遠レンズ付きのカメラを取りに帰り、撮影していたところ、居合わせたキャンパスの新聞記者に写真を送るよう頼まれ、e-mailで送りました。後日、新聞に写真が掲載されるでしょう。
譲り受けたトビ
トビを、神奈川県 自然環境保全センターから、譲り受けました。自然環境保全センターには、14羽前後のトビが収容されていて、いずれの個体も、骨折等の傷病鳥で野生復帰が困難な鳥たちです。この中から、比較的若い個体(1-2歳)2羽と、3歳以上の個体と10歳を超えた成鳥2羽を選ばせていただきました。




驚いたことは、トビは「死んだふり」をするということです。移動用のカゴに入れると、ひっくり返ったまま、そのままじっと動きません。また、到着後、飼育室のカゴに入れても、うずくまったままじっとしています。その内、馴化するとは思いますが、実験箱に馴化するのに時間がかかるのではと今から心配しているところです。
飼育室での様子は、後ほど掲載予定です。
トビの研究室への導入(洗浄と足革の装着)
これが「死んだふり」のトビです。しばらくこのまま、じっとしていて動きません。


今日は、杉崎さんにわざわざ来ていただいて、足革の作成・装着、保定の仕方、据え(拳にとまらせること)の実習をしていただき、さらには、杉崎さん作成のフード(頭巾)およびキャスティング-ジャケット(保定具)・ルアーまでいただきました。感謝申し上げます。






先ずは、保定し、羽が汚れていたのでお湯で洗うことにしました。羽は、歯ブラシで洗うそうです。今回は、手近にあったプラスチックの刷毛で洗いました。保定は、キャスティング-ジャケットでくるんで行います。保定後、フードをかぶせます。こうすると、完全に大人しくなります。神奈川県 自然環境保全センターでは、頭ごとタオルにくるんで保定していました。






次ぎに、足革をつけます。













爪が伸びている場合は、爪を切ります。

これで終了です。













この様に、ひもでつないでおくと、外へ出すときに容易に引き出すことが出来ます。ひもを付けていないと、引き出すとき暴れてかえって羽を痛めたり怪我をする危険性があります。
トビのマニング(人への馴化)訓練
4羽の内、3羽が手から餌のウズラの肉を食べるようになりました。順調に馴化が進んでいます。

餌は、冷凍のウズラを解凍した後、足の先と頭部を切り取ります。その後、内臓を取り出し、叩いて骨などを砕いて、細かく切って与えます。
これまでは、フードをかぶせないとなかなか落ち着いて拳に留まらなかったのですが、最近は、2羽がフードなしで留まるようになっています。

体重計にも、フードなしで大人しく留まっています。

馴化初期には、体重測定の後に餌をあげようとしたところ、食べようとしないので、餌を与えてから体重測定をしていましたが、今後は徐々に、体重測定の最中、およびその直後に餌を与えて、体重計に乗る反応をオペラント強化していく予定です。
実験装置の紹介1
【トビ用強化子提示装置の開発】
現在、トビ用のスキナーボックスを作成しています。今まで対象としたことがない新しい動物のオペラント条件づけを行うときに最も重要な装置は、強化子(餌)を提示するフィーダと、反応の検出のための操作体(manipulandum)です。
動物や強化子の種類によって、フィーダは異なります。デンショバトでは、一般的に麻の実やトウモロコシなどが強化子になります。穀物は、一個一個の大きさや形が若干異なることと、一粒ずつ提示するのは難しいので、多くの実験では、穀物の入った箱を一定時間くちばしが届く位置まで上昇させ、その時間を調整することにより強化子を提示します。水を強化子にする場合も同様です。

ラットやマウスの場合は、人工飼料(ペレット)が一般的に利用されていて、一粒ずつ提示が可能なペレットディスペンサが開発されています。


サルなどの場合は、ユニバーサルフィーダと呼ばれる強化子提示装置がよく利用されます。サル用のペレットやフルーツなどを円形の回転板の溝に入れ、一個分ずつ回転板を回転させて、丁度ブラシの位置に来た強化子をブラシで掃き出す仕組みになっています。


ペンギンの実験では、半分に切ったコアジを提示するため、円形の回転板にしきりを設け、一個分ずつ回転させ提示しました。→ペンギンの装置
今回は、解凍された生のウズラの肉を強化子として使用するので、工夫が必要でした。どの実験でもそうですが、確実に強化子を提示できなければなりません。生肉はくっつくので、多くの動物で良く利用されるユニバーサルフィーダは、肉がブラシにくっついてしまうことが考えられ、確実に強化子が提示されない可能性があります。ブラシを使用しない、ペンギンで使用した提示装置ではこの様な問題が生じませんが、円盤を用いるため、装置が大きくなる欠点があります。そこで、今回は目の前まで直線的に強化子の肉を運び出して提示することにしました。
運搬する手段として、ラダーチェーン(タミヤ製)を用いることにしました。このラダーチェーンは、パーツの一個一個が着脱可能で、長さの調節が容易です。また、洗浄が楽です。このラダーチェーンに肉をのせて、運びます。


強化子を所定の位置に確実に提示するためには、餌の位置を検出するセンサが必須です。所定の位置にセンサを設置して、強化子がその位置に来たらストップできれば良いわけです。光(通常赤外線)を利用したセンサには、投光器と受信機がペアーになった透過型のセンサと、投光器と受信機が同側にある反射型があります。透過型は、投光器と受信機の間を物体が遮るのを検知します。反射型は、センサの直前に現れた物体がセンサから投光された光を反射するのを検知します。私は、セキセイインコの実験では反応検出用としてグラスファイバを用いた反射型のセンサを愛用してきました。このセンサは、センサ本体(アンプ部)と投光・受信の位置が離れていて、また投光・受信を行う先端部分が小さいので、位置決めが容易です。今回も反射型のセンサを提示位置に設置し、強化子がその位置に到達したことを感知して強化子の移動をストップさせる方法を考えました。ところが、センサを強化子の近くに設置すると、強化子は生肉なので、食べている最中に破片がセンサの表面にくっついてしまって誤作動する可能性が考えられます。また、センサ部が汚れてしまう可能性もあります。次ぎに考えた方法は、餌が飛び散っても届かない距離に設置できる比較的検出距離が長い長距離検出用のセンサを用いることでした。しかし、距離が長くなると被験体の羽などの障害物がセンサと強化子の間に入って、誤検知する可能性が高まります。
そこで、強化子を提示する少し手前で感知し、感知してからさらに少し送り出すことにしました。こうすることで、飛び散った肉片がセンサの感知部分にくっつくことがかなりの程度防げるはずです。センサは、オムロン製のアンプ内蔵型センサ(E3Z-G61)を利用しました。昔はこの種のセンサを手に入れるために、秋葉原で探し回ったりしたものです。また、電話で注文してしばらくしてから届いてみると、想定していた機能がなかったりと、結構大変でした。最近は、インターネットでカタログや性能表等を調べた上で、Web上のフォームに入力し注文すると、翌日、あるいは翌々日には届きます。便利になりました。下の写真のケーブルがついている黒いコ型の部品がそのセンサです。


強化子提示部

写真3:強化子が丁度センサを横切った瞬間

写真4:強化子が少し送り出され、停止した瞬間
適切な位置で強化子を止めるために、1回転200パルスで動作するステッピングモータを利用することにしました。1パルス送信すると1.8°回転させることが出来ます。センサを横切ってから1/4回転(50パルス)で丁度所定の位置に提示することが出来ました。

フィーダは実験箱の横から挿入する予定ですが、正面にも設置可能です。横から挿入した場合に、送り出す前の肉片が見えることを避けるために、黒いカバーがつけてあります。
実験装置の紹介2
【トビ用スキナーボックス】
オペラント条件づけでは、弁別刺激(色や形など)を提示し、何らかの反応が生じ、その反応に対して何らかの結果(餌の提示や水の提示)が与えられます。オペラント反応は、通常、その種にとってある程度出現頻度が高く、測定器で容易に自動検出可能な反応が用いられます。ラットやマウスではレバー押し反応、サルなどでは、レバー押しやタッチスクリーンへの指によるタッチ反応がよく用いられます。鳥類では、一般につつき反応がオペラント反応としてよく用いられます。特殊な例としては、鳴き声(Manabe, kawashima, & Staddon, 1995他)や、回転反応(Manabe, 1992)やテコ踏みなどがあります。今回のトビの場合も、つつき反応にしました。くちばしでパネルを押す反応です。
弁別訓練では、概して、弁別刺激そのものへ直接反応させた方が、弁別刺激が提示される位置と違うところにある操作体(反応する対象)に対して反応させる場合より、弁別の形成が早いことが知られています。従って、鳥類では、刺激を実験箱の正面パネルに取り付けられた窓(反応キィ)に提示し、その反応キィ(実際には、透明なアクリルパネル)をつつく反応を強化します。今回の実験では、比較的大きな物体を提示する可能性があるので、窓は比較的大きめ(左右それぞれ15cm×15cm)にしました。
つつき反応を検出する場合の留意事項は、検出スイッチの感度です。感度には2種類あって、検出する最小の力と、アクリルパネルの最短の移動距離(ストローク)です。始めからつついてくれるわけではないので、逐次接近法(シェイピング)でつつき反応を形成しますが、反応キィが硬いとなかなか反応を自動強化するのが困難になります。最初はキィにかすかに触れる程度なので、スイッチが自動的に感知するまで、反応の強さをあげていくには時間がかかります。また、押す距離が長い場合でも、同様です。2つの感度を出来るだけ上げれば、シェイピングが楽になります。ただ、あげすぎるとちょっとした振動でもスイッチが反応してしまい、誤作動の原因になります。誤作動しない最大の感度に調節する工夫が必要です。
今回は、フィーダで使用しているものと同じフォトセンサを用いて、つつき反応を検出することにしました。フォトセンサは、機械的な動きがないので、故障が少ないということと、反応を検出するまでのストロークの調整が比較的楽に出来ます。実験によって反応キィの形状や操作体そのものが変化する可能性があるので、正面パネルの上半分の反応キィは取り外しが出来るように、ビス止めしてあります。


スキナーボックス自体の大きさは、縦横高さそれぞれ、50cm×40cm×50cmとしました。サル用のスキナーボックスを一回り小さくした感じです。
この後、必要とされる装置は、刺激提示用の装置と、一時的に弁別刺激を見る窓を遮るシャッターです。
実験装置の紹介3
【トビ用実験装置概略】
まだ、一部の部品の到着を待っていて、装置は完成していませんが、今回の実験装置の概略を以下に示します。
実験制御用PCに接続されたUSBハブには、2つのUSB I/O((有)テクノラボ製YNUSB I/O)と、USBサーボコントローラが接続されています。1つのUSB I/Oは、フォトセルからの入力を検出するI/Oボックスと、ステッピングモータコントロールボックスに接続されています。主として、反応の検出と強化子の提示を行います。もう一つのUSB I/Oは、D/Aボードに接続され、最終的にDCモータコントローラに接続されています。風車の回転数の制御をおこなうための装置です。USBサーボコントローラは、シャッターの開閉を行うサーボモータの制御を行います。
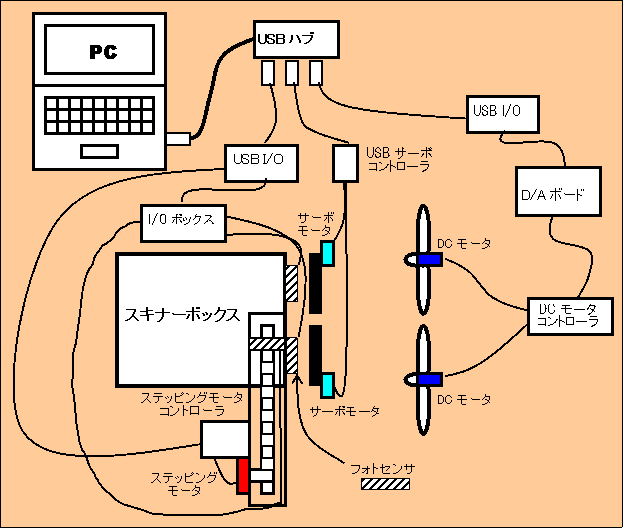
現在までに完成している部分は、スキナーボックス本体とフィーダです。到着を待っている部品が、サーボモータとD/Aボードです。
いきなり風車が登場したので、奇異に感じられる方もおられると思います。今回の実験の主たる目的は、回転する物体が透明化(motion smear)してくる閾値を測定することにあります。実際に風車を回転させて、閾値を測定することにしています。
弁別刺激として用いる風車の回転速度は、試行毎に左右独立して変化させる必要があるので、速度変更中は、被験体の視界を遮る必要があります。シャッターが必要なわけはこの様な理由からです。シャッターは黒色不透明のアクリル板をラジコン用のサーボモータ(FUTABA製S135)で駆動することにしました。サーボモータは、USB接続が可能なPololu社製USB16サーボコントローラで制御します。このボードが優れもので、とても小さく、なおかつ、USBで16個のサーボモータを同時に動かすことが出来ます。参考のために、100円玉を置いてみました。


サーボモータは、一定幅のパルス(5V)を1秒あたり50回程送信し続けると、そのパルス幅にあった回転角度で静止します。一般的なサーボモータだと、仮に0°~90°の範囲で動く場合、2ms(1/500秒)のパルスを送信すると右(あるいは左)に90°、1msのパルスだと0°、1.5msだと真ん中の45°の位置で静止します。PCから直接I/Oボードを経由して制御可能ですが、パルスの制御に機能がさかれて、他の作業がおろそかになる可能性があります。USB16サーボコントローラを使用すると、1回のコマンド(命令文)の送信で、後は何もしなくてもその角度を維持させることが可能です。また、微妙にパルス幅を変化させることが出来、そのパルス幅にあった角度に動かすことも可能です。精度は、90°/256あるいは180°/256です。風車の視認させる位置を限定する様なことにも使用可能かも知れません。
これまでの実験では、ペンギンの実験を除いてモータの使用を極力避けてきたのですが、今回は多用しています。それも3種類も。これまでモータの使用を極力避けてきた理由があります。今から20年以上も前になりますが、デンショバトで単色光を利用した実験を行っていました。この種の実験では、色を変化させるために、PCで色フィルターをモータで回転させて交換する方法と、光源の前にあるプリズムの角度をモータで制御して、単色光を取り出していました。今は少しは進歩したのでしょうか?例えばLEDを使うとか?当時使用していた機器は前者のもので、三双製作所のモノクロメータでした。モータはDCモータで、回転板に開けた穴をフォトセンサーで検出して数を数えることにより位置を決めていました。このモータを回転させるときに、回転のし始めには少しずつ回転数を上げていって、止めるときは少しずつ回転数を落としていかないと、止めたいところで止まってくれず、行き過ぎてしまいました。当時は、A/Dボードは持っておらず、パソコンも8ビットのMSX2コンピュータを使っていました。電圧では制御できないので、パルスの幅を少しずつ短くしていくというようなこと(当時はパルス幅を制御するPWMについてよく知らなかった)を試行錯誤でやりながら、何とか苦労しながら動かしていました。そういうわけで、モータ制御は出来るだけやりたくないと思っていました。ただ、最近は、安くて小さく、制御が楽なモータコントローラが発売されていて、また、PCの性能も十分すぎるほどの能力があります。今回は、予算もあるので、ある程度楽をしながら製作が進んでいます。PCでの制御の前(今から30年ぐらい前)は、プリズムの角度(色)と明るさを変えるためダイヤルを実験者が動かしていました。その他の制御は、ロジックモジュールという論理回路を組み合わせた装置で制御していました。色を切り替える試行間隔の10秒ほどの間に、暗い部屋の中で、2つのダイヤルを回して次の試行で提示する色と明るさに変更し、さらに、直前の試行の電磁カウンタで記録された反応数をペンで記録し、その電磁カウンタをリセットするという神業をやっていた思い出があります。
三双製作所というと、当時の社長(今もそうかも知れませんが)は物静かな紳士で、光学については研究者より博識で大変良い方でした。しばらくして、私が、当時勤めていた大学をやめてアメリカに行くことになりました。以前、社長が使っていたドライバーを見て、私が「これいいですね」と言っていたことを覚えていらっしゃって、餞別にその新しいドライバーをいただきました。感激しました。この場を借りて、再びお礼を言わせていただきます。
実験装置の紹介4
【シャッター】
届いたサーボモータのトルクがいまいちのため、重たいアクリル板を開閉するのではなく、バルサで補強した黒色の画用紙を開閉することにしました。


【風車】
風車が完成しました。実物の風車の約1/130のモデルを、ブレードはバルサ材、支柱は金属、台座はヒバ材で作成しました。ブレードは、東急ハンズの職人さんに、本物の図面からとった型紙から切り出してもらいました。日本に帰ってきてからの装置作成(ペンギン用など)では、東急ハンズのお世話になっています。東急ハンズでアクリルパネルを買い、その場で適切な大きさにカットしてもらいます。持ち帰ってアクリル用瞬間接着剤(アクリサンデー)で接着して出来上がりです。 私がDuke大学にいた頃は、心理学科と医学部が共同で心理学科の地下一階にMachine Shopを持っていました。Machine Shopといっても、機械を売っているのではなくて装置を作成するところです。電気系と工作系のtechnicianがいて、装置作成を手伝ってくれました。私は装置作成が好きな方なので、彼らと結構気があって、親切にしてもらいました。セキセイインコの反応キィにつけるフォトセンサーの回路に使うトランジスタを多めにもらって部品箱の中に入れていたところ、その部品が最近役に立ちました。 Dukeをやめる頃、Machine Shopを廃止するというような話があがっていてました。その後、Meryland州立大学に移ってから、何度か訪ねましたが、無事にまだお二人ともいらっしゃいました(笑)。ホッとしたのを覚えています。アメリカは、予算削減で簡単に失職しますから。
東急ハンズは、私にとってのMachine Shopです。

回転用のモータは、世界的モータであるマブチモータを使用し、遊星ギアで1/25に減速し、トルクを稼いでいます。

モータの回転数は、D/Aボードで電圧を変化させ、その電圧に対応した出力をモータドライバ(Dimension Engineering製SyRen10A)から出力し、制御しています。
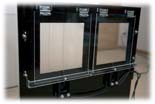
下の写真は、モータコントロールユニットですが、ボックスを2つ重ねています。下の白いボックスには、USBI/OボードとD/Aボードが入っています。上の黒いボックスには、モータドライバが左右の風車をそれぞれ制御するため、2個入っています。
このモータドライバも小さく出来ています。しかし、高性能で18V連続10Aの運転が可能です。

モータの回転数制御には2種類の方法があります。わかりやすい方法は電圧そのものを変えて、回転数を変化させる方法です。電圧を上げれば、回転数も増えます。一方、通電時間を変化させることにより、回転数を制御することも可能です。DCモータは、回転し始めると電気を遮断してもある程度慣性で回転を続けます。そこで、一定時間通電して、一定時間遮断して、また通電して遮断してを繰り返しても、条件が合えば、回転を続けます。通電時間と遮断時間の比(デューティ比)を変えれば、回転数が変化します。通電時間の方を増やすと早くなり、減少させると回転数も少なくなります。この方法を、パルス(通電)の幅(時間)を変化させる方法という意味で、Pulse Width Modulation(PWM)と呼びます。今回は、最初はPWMで制御しようと考えていました。この方法では、PCがパルス幅を常時制御し続ける必要があります。被験体の反応を検出し、強化子を提示し、シャッターを開閉し、さらにモータの回転数を制御し等々、一台のPCで制御するには負荷がかかりすぎます。そこで、モータ制御用のPCを別に用意して回転数の制御を行おうと考えて準備していました。現在所属している大学院は、通信制の大学院でインターネットを介したコミュニケーションを主たるコミュニケーションチャネルとしているため、PCが必須です。入学と同時に20万円相当のノートブックが貸与されます。貸与とはいっても、修了時には差し上げています。予備に保存しているもののなかに、型が古くなって廃棄処分を待っているノートブックが何台もあります。そこで、その何台かを実験用に譲り受け、モータ制御用に使用しようと考えたわけです。メインのPCにモータ制御用のノートブックを2台つなげて力任せにやろうと考えていました。ただ、この方法だと、PC間の情報のやりとりが必要となり、結構面倒です。その内、前述のモータドライバが見つかり、D/Aで制御することが楽に出来ることが分かり、電圧制御に切り替えました。D/Aボードを使用した場合、一度電圧を設定するとそのままその電圧が維持されますので、常時制御信号を出力する必要はありません。
実験制御プログラム(コンピュータプログラム)の紹介
【制御プログラム】
ほぼ、実験制御プログラムが完成しました。今回もVisual Basic Ver.6で作成しました。パソコンで実験を始めた全くの最初は、機械語でしたね。Z80ボードで。次は、NECのPC60、80、88、98シリーズとNECの経営に貢献しました(笑)。NECのシリーズは、N-BasicあるいはN88-Basicでした。前前回説明したMSX2コンピュータも使いました。記憶が定かでなくなりつつありますが、60・80シリーズはカセットテープ、88シリーズは8インチあるいは5インチのフロッピィー、98とMSX2は3.5インチフロッピィーにプログラムを記録していました。型名を失念してしまいましたが、ミニコンは、紙テープに穴を開けてプログラムしていました。アクリルで出来た8インチと5インチのフロッピィーケースは、使わなくなったときに、セキセイインコのスキナーボックスに姿を変えました(笑)。アメリカに渡ってからは、IBMコンパチブルです。音声実験をやっていた頃は、スピードが要請されたので、Cでプログラミングしていました。
その頃に比べると、パソコンの性能は桁外れです。音声処理(例えばセキセイインコの鳴き声の実時間認識)を行うときは、高価な専用のDSPボードでリアルタイムフーリエ解析を行っていましたが、今や、PC本体で出来ます。
今のパソコンは、性能が良くなった反面、厳密な機械制御にはむかなくなってきています。OS(Windows)の問題で、直接ハードを制御するのが難しくなっています。また、実験制御に重宝したプリンターポートも今やなくなりつつあります。USBが取って代わっています。今回の実験では、処理スピードが必要なリアクションタイムを計るようなことはしないので、全てUSBで制御することにしました。スピードが遅い反面、USBはシリアル接続なので、配線が少なくてすみます。制御室から実験室まで1本のUSBケーブルを引いて、その先にUSBハブをつければ実験可能です。
このソフトでは、シェイピング(反応の形成)から始まって、被験体の反応によって風車の回転速度を変化させることが出来ます。閾値の測定は、上下法で行います。
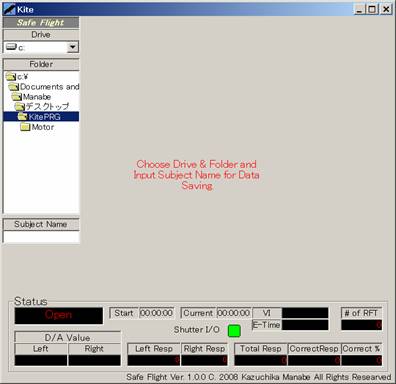
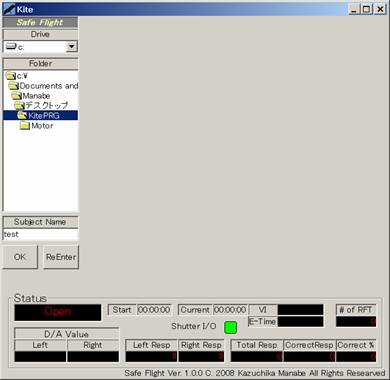
フォルダーを選んで被験体の名前を入力すると、自動的にファイル名に被験体名と日付、時間が付加されたDataファイルが作成されます。
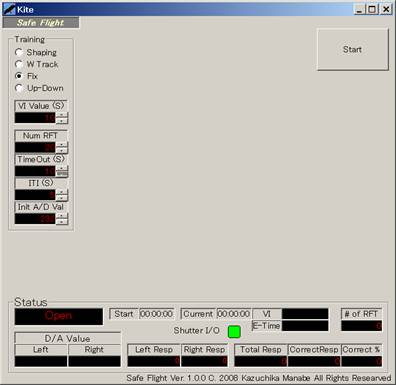
訓練の種類(シェイピング・左右の反応窓に対するランダム強化・弁別訓練・上下法による測定)のどれかを選択し、強化数などのパラメータを選択します。
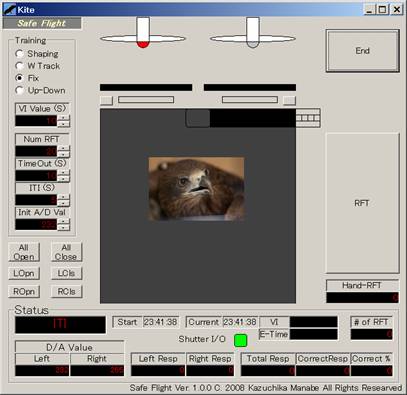
スタートボタンを押すと実験の準備状態になります。画面上にトビとシャッター、フィーダ、風車などが現れます。ただし、これは実験者側のPCモニターですので、被験体にはこの画面は見えません。赤い風車が高速で回転している風車、灰色の風車は、低速で回転していることを示しています。回転が安定するまで、この状態が続きます。この状態では、シャッターは閉じています(風車の前の黒い板の部分)。

準備状態が終了すると、実験が始まります。シャッターが開きます。

正反応(低速風車が見えている窓への反応)に対して強化が提示されている強化中(餌提示中)の画面です。シャッターは閉じ、風車も停止します。風車は全景が見えるのではなく、ブレード(羽)の先端部分のみが窓から見えるように、設定されます。正反応に対しては、訓練の後期では、VIスケジュールで強化します。VIスケジュールについては、後ほど説明します。

試行と試行の間の画面です。シャッターが閉じています。この間に、風車の回転数を変化させます。

間違った場合は、一定時間シャッターが閉じ、待たされます(反応を受け付けません)。誤反応に対してはタイムアウトを入れないと、正反応率がなかなか上昇しません。わかりやすくいうと、間違っても特に損はしないので、「適当」にやり始めるからです。
強化数が設定回数に到達するか、実験者による強制終了(Endボタンを押す)のどちらかで、訓練が終了します。この時点で、DataがDataファイルに保存されます。
このソフトのタイトルは、”Safe Flight”で、この実験の目的に由来があります。
過去の実験制御装置の遺物
前回、大昔のプログラム保存の手段について記述しましたが、現物が出てきました。今日は、トビのスキナーボックスを実験室に設置しました。設置する前に、実験室を整理していたところ、大変古い装置などが出てきました。
まず、紙テープにプログラミングする時の紙テープと、プログラム訂正用のコクヨのミスパンチ訂正器です。



縦一列に並んだ穴に、ピンを押し込んで紙に穴を開けます。一列が終わったら、次の列に紙を動かして、手で開けていきます。
これは、ロジックモジュールのプログラムカセットです。
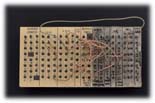
パソコンを使ったプログラミングが普及する前は、ICを使って電子回路を組んで実験制御を行っていました。ハンダづけで組んだり、複数の電子モジュールをその都度ワイヤーでつないで簡単な制御プログラムを作ったりしていました。その内、いちいち配線し直すのは面倒なので、上記のようなカセットが出てきました。このカセットにはピンが何本も立っていて、これを線でつなぐことでプログラムしていました。違う実験を行う場合は、カセットを入れ替えればすみました。
カセットテープにプログラムを記録していた時の、ゲームソフト等も出てきました。
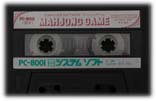

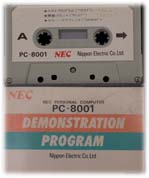
カセットデッキの音声信号(FAX通信の音のようなもの)をパソコンにつないで、その音声信号をパソコンで読み取っていました。上の2つは麻雀ゲームです。
これは、未開封の5インチフロッピィーディスクです。未開封といっても、今や使い道がありません(笑)。



古い累積記録器やイベントレコーダも出てきましたので、また、後ほど掲載します。
開いている反応窓への反応の分化強化訓練ビデオ
【予備訓練】
これまで、 以下の順でトビの訓練が進んできました。
1)実験者へのマニング(馴致訓練)
2)実験箱への馴化訓練
3)反応窓へのつつき反応のシェイピング訓練
現在、シャッターが開かれた窓への反応のみを強化する訓練を行っています。下の写真をクリックすると、訓練の模様をご覧いただけます。シャッターが開かれた窓をつつくと、強化(餌が提示)されます。最終的には、弁別刺激が反応窓から離れた位置に提示されます。このような場合、遠くの刺激に対する反応は、空をつつくような反応になります。訓練の初期には、その状態での反応形成は難しいため、反応ターゲットとして小さな肉片をアクリルパネルに貼り付けてありますが、訓練が進むと除去されます。
予備訓練のビデオ
反応の位置をよく見ると、必ずしも餌を食べようとしてかじっているのではないことが分かります。まだ、時々シャッターが閉じている窓への反応が見られます。また、両方の窓が閉じているときの反応が見られます。この反応をそのまま放置していると、のべつ幕無しにつつくようになるため、試行間隔中に反応した場合は、一定時間経過しないと次の試行が始まらないような手続きを導入します。
装置に関しては、フィーダーがかじられるという想定されたトラブル(?)を除いて順調に稼働しています。フィーダーも5mm厚のアクリルを使用したので壊されることはないと思います。
試行間隔中の反応に対する遅延手続きの導入
【予備訓練2】
今日は、ターゲットとして貼り付けていた肉片を除去し、シャッターが閉じている間に反応があった場合は、最低3秒間は次の試行に移らない手続きを導入しました。問題なく、反応しています。
シャッターが降りている間の反応が少なくなったことと、ほとんどの反応がシャッターが開いている窓へなされるようになったことが分かります。
スキナーボックスの内側の映像です。緑のバーは、人工芝を巻いた止まり木です。

風車の回転速度の弁別訓練ビデオとトビのFood begging call 1
【弁別訓練】
現在、1羽が予備訓練中で、2羽が弁別訓練に移行しています。弁別訓練では、高速で回転する風車と、低速で回転する風車が、左右の窓に試行毎にランダムに提示され、低速の風車が提示されている窓に対して反応すると強化されます。1羽が、ほぼ弁別が形成されつつあります。下の動画は、その弁別訓練の模様です。たまに、誤った選択を行い、15秒間のタイムアウトが与えられています。
トビに餌を与えるとき、良く鳴きます。この鳴き声は、親鳥から餌をもらうときに発するFood begging callと思われます。セキセイインコでは、Food begging callが、成鳥になったときにお互いに鳴き交わすContact callに変化するというDr. Brittan-Powellの報告があります。トビが、上空を旋回しながら鳴いている鳴き声に近いように感じますので、多分、トビもセキセイインコと同様に、Food begging callが成鳥になったときのCallに変化するのかも知れません。
トビのFood begging call(?)
【弁別訓練2】
今日は、3羽目の個体も本弁別訓練に移行しました。先に本弁別訓練へ移行していた2羽は、ほぼ弁別が完成しつつあります。
計4羽の個体が飼育されていますが、各個体に、飼育・訓練を行っている学生が付けた名前があります。「おはぎ」、「よもぎ」、「かしわ」、「さくら」です。餅からとったようです。弁別が進んでいるのは、「おはぎ」と「よもぎ」、今日、弁別訓練に移行したのは「かしわ」です。「さくら」は、なかなか馴化せず、現在「待機」中です。
この前のページで紹介した鳴き声は、携帯電話で録音したもので短かったので、ボイスレコーダで録音し直しました。正式には、ちゃんとした録音機で記録する必要がありますが、音声分析を行うことになったときに再録する予定でいます。
トビのFood begging call2
これは、「おはぎ」の鳴き声です。
【弁別訓練3】
現在、3羽目の個体(かしわ)も弁別が完成しつつあります。
【発声】
トビの発声を録音するために、無圧縮のリニアーPCM録音が可能なSONYのPCM-D50を私費で購入しました。最近良く使われるMPG3などの録音形式は圧縮されているために、音声研究には不向きです。この録音機は、無圧縮のリニアーPCM録音が可能な上に、デジタル光出力がついており、無圧縮形式でコピーしたCD音楽をPCから本機にUSBで転送し、自宅のD/Aコンバーターにつなぐと、高音質で音楽も楽しむことが出来ます。この様な私的な利用も考えられることと、早く録音を開始しないと、成鳥に伴い鳴き声が変化することが考えられるので、即座に購入しました。ちなみに、成鳥である「かしわ」と「さくら」はほとんど鳴きません。


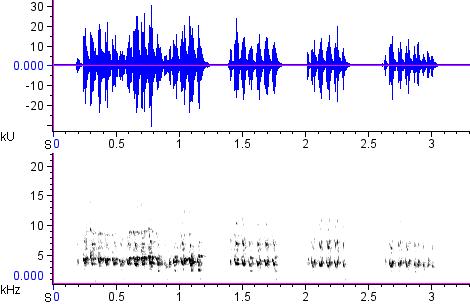
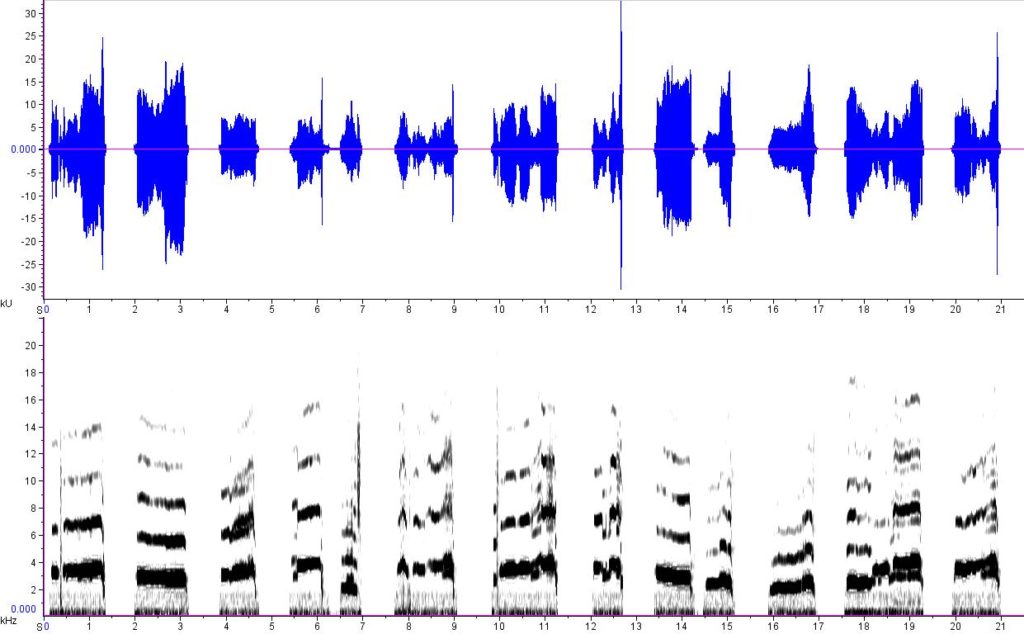
下の図は、おはぎの発声の波形とソナグラム(声紋)です。発声の最も低い周波数成分である基本周波数を見ると、2KHz付近で周波数が変化しないものや、2KHzから3KHz付近まで周波数が上昇する鳴き声、また、4KHz付近で周波数が変化しない鳴き声など、様々なバリエーションがあることが分かりました。これほど変動性が高いと、セキセイインコで行った音声オペラント実験がトビでも出来るかも知れません。

【弁別訓練4】
現在、2羽の個体が、上下法による閾値測定条件に移行しました。
【発声】
ほとんど鳴かないさくらの警戒音(Alarm Call)が録音できました。
短い4KHz程度の周波数のトリル(trill)音です。